
变电站是电网的重要组成部分,其内部设备多、种类杂、运行和管理难度大。变电站设备长期暴露在自然环境中,不仅要承受正常机械载荷和电力负荷的内部压力,还要经受污秽、雷击、强风、及鸟害等外界侵害。这些都会导致其元件老化,如不及时发现并消除隐患,就可能造成事故,严重威胁电网安全。因此,变电站巡检是一项基础运维工作,通过对变电站设备的巡检,掌握设备运行状况及周围环境变化,及时发现设备缺陷和安全隐患,提出具体检修意见,以便及时消除缺陷,预防事故发生,从而保证输变电设备安全和电力系统稳定。

针对变电站的运行管理模式和常规作业方式,传统巡检方式面临的困难有:劳动强度大、而且劳动效率低,利用普通仪器或肉眼来巡查设备。这种方式已经不能完全适应现代化电网建设与发展的需求。传统人工巡检模式已逐渐被淘汰。基于变电站高精度点云三维模型的无人机自主巡检成为主攻方向。
基于变电站高精度点云三维模型的无人机自主巡检主要由高精度点云数据采集、航线规划、无人机自主巡检三个部份组成。上篇文章中已经介绍了如何获得变电站高精度点云三维模型,本文介绍天源欧瑞在航线规划与无人机自主巡检中的思路。
一、标记变电站设备部件点
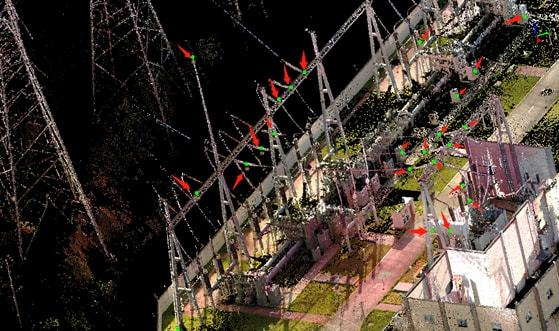
通过预先采集数据重建的三维模型,将各个避雷针、阻波器、避雷针计数器、绝缘子、油表、构架的三维坐标标记出来,设置拍摄方位,设置生成航点与目标点的距离,通过相关计算生成相关拍摄航点并在仿真平台上显示无人机拍摄角度。
二、航线规划
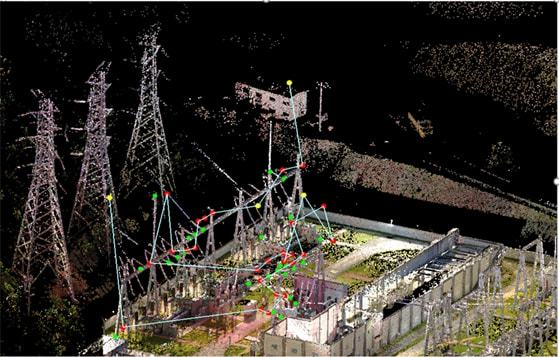
据变电站各种设备位置特性及无人机起降点的位置等关系,考虑无人机作业安全情况下,采用航点、航线相离经过模型位置有一定的安全距离,通过三维仿真平台计算航线安全性。调整未通过安全性检查的危险航点参数,最终生成无人机巡检航线。
三、自动巡航,航线一键起飞
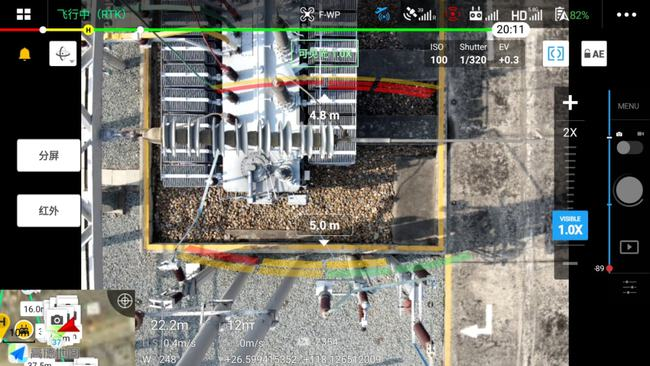
将仿真飞行确定安全的航线导入智能 App 上传至无人机飞控,航线一键起。智能化巡检变电站避雷针,无人机到达某个航点提示,实时图像观察无人机位置,状态。
四、采集数据自动按航点分类
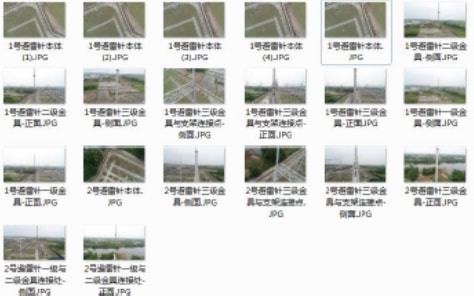
无人机智能化巡检变电站的照片杂乱无章,通过将影像数据导入三维平台,对每一张影像与航点进行匹配,设置阀值计算,按照一定规则将影像分类命名保存。
五、机器视觉识别缺陷
无人机智能化巡检会采集大量的数据,若是这些数据需要靠人工查看是否存在隐患,需消耗大量人力、物力、财力。随着机器视觉技术越来越成熟,机器视觉识别缺陷成为未来电力巡检的趋势,如图所示。通过输入影像,将有缺陷的图片标记并输出。

无人机基于高精度点云模型提取部件点生成航线进行自主巡检,与较常规方法相比较,更为安全、先进、有效,即克服了地面巡检距离远和观测视场角太小的难题,也解决了人工登高检查费用高、安全性差等问题。随着无人机技术的高速发展,无人机巡检将成为变电站一种新的巡检方式,极大的提高巡检的效率和科技含量,有效减轻巡检人员的工作强度,具有广阔的应用前景。